 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yr1161772517
发布时间:2022-06-04
[主观题]
打磨机器人能够按照预先设定的路径( 输入指令)对加工后的工件进行打磨抛光。在实践中,机器人
打磨机器人能够按照预先设定的路径(输入指令)对加工后的工件进行打磨抛光。在实践中,机器人
打磨机器人能够按照预先设定的路径(输入指令)对加工后的工件进行打磨抛光。在实践中,机器人自身的偏差、机械加工误差以及工具的磨损等,都会导致打磨加工误差。若利用力反馈修正机器人的运动路径,可以消除这些误差,提高抛光精度。但是,这又可能使接触稳定性问题变得难以解决。例如,在引入腕力传感器构成力反馈的同时,就带来了新的稳定性问题。
打磨机器人的结构图如图3-20所示。若可调增益K1及K2均大于零,试确定能保证系统稳定性的K1及K2的取值范围。
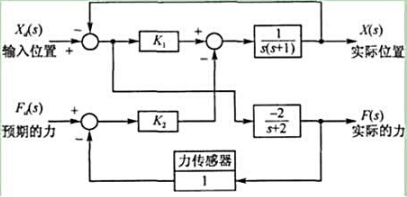
图3-20打磨机器人
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案






























