 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yr1161772517
发布时间:2022-06-04
[主观题]
1984 年2月7日,美国宇航员利用手持喷气推进装置,完成了人类历史上的首次太空行走,如图3-15(a)
1984 年2月7日,美国宇航员利用手持喷气推进装置,完成了人类历史上的首次太空行走,如图3-15(a)
所示。宇航员机动控制系统结构图如图3-15 (b) 所示,其中喷气控制器可用增益K2表示,K3为速度反馈增益。若将宇航员以及他手臂上的装置一并考虑, 系统总的转动惯量J = 25N .m.s2/rad。要求:
(1)当输入为单位斜坡r(t)=+(m·s-1)时,确定速度反馈增益K3的取值,使系统稳态误差ess(∞)≤0.01m。
(2)采用(1)中求得的K3,确定K1K2的取值,使系统超调量σ%≤10%。
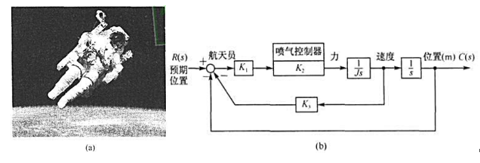
图3-15宇航员机动控制系统
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案






























