 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yr1161772517
发布时间:2022-06-04
[主观题]
机器人应用反馈原理来控制每个关节的方向。由于负载的改变以及机械臂伸展位置的变化,负载对机
器人会产生不同的影响。例如,机械抓负载后,就可能使机器人产生偏差。已知机器人关节指向控制系统如图3-10所示,其中负载扰动力矩为1/s。要求:
(1)当R(s)=0时, 确定 对C(s)的影响,指出减少此种影响的方法;
对C(s)的影响,指出减少此种影响的方法;
(2)当N(s)=0, 时, 计算系统在输出端定义的稳态误差,指出减少此种稳态误差的方法。
时, 计算系统在输出端定义的稳态误差,指出减少此种稳态误差的方法。
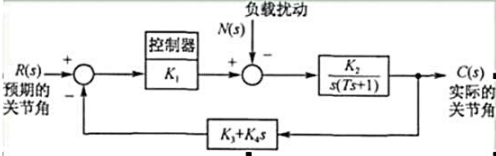
图3-10机器人关节指向控制系统.
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案






























