 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友guiwufeifei
发布时间:2022-01-07
[主观题]
一矩形阵列由数字0到9组成,数字1到9代表细胞,细胞的定义为沿细胞数字上下左右还是相同数字则为同一细胞,如:阵列
一矩形阵列由数字0到9组成,数字1到9代表细胞,细胞的定义为沿细胞数字上下左右还是相同数字则为同一细胞,如:阵列 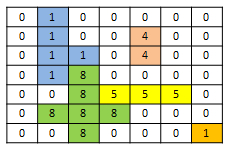 有5个细胞,编写程序求给定矩形阵列的细胞个数(函数参数为:二维数组,数组行数,数组列数)。
有5个细胞,编写程序求给定矩形阵列的细胞个数(函数参数为:二维数组,数组行数,数组列数)。
一矩形阵列由数字0到9组成,数字1到9代表细胞,细胞的定义为沿细胞数字上下左右还是相同数字则为同一细胞,如:阵列有5个细胞,编写程序求给定矩形阵列的细胞个数(函数参数为:二维数组,数组行数,数组列数)。
有5个细胞,编写程序求给定矩形阵列的细胞个数(函数参数为:二维数组,数组行数,数组列数)。
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
 抱歉!暂无答案,正在努力更新中……
抱歉!暂无答案,正在努力更新中……

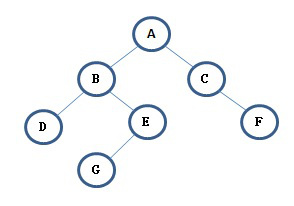 二叉树节点定义如下: struct node { char data; node * leftchild; node * rightchild; }; 二叉树输出测试函数如下 void print(node * root, int t) { if (root==NULL) return; print(root->rightchild,t+1); for(int i=0;i<t;i++) printf("\t"); printf("%c\n",root->data); print(root->leftchild,t+1); } 要求:请写出建立二叉树的函数,函数原型为: node * create_bt(string str);
二叉树节点定义如下: struct node { char data; node * leftchild; node * rightchild; }; 二叉树输出测试函数如下 void print(node * root, int t) { if (root==NULL) return; print(root->rightchild,t+1); for(int i=0;i<t;i++) printf("\t"); printf("%c\n",root->data); print(root->leftchild,t+1); } 要求:请写出建立二叉树的函数,函数原型为: node * create_bt(string str);




























