 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友chendw2008
发布时间:2022-01-07
[主观题]
恢复机器人系统到出厂状态采用 。
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
题目内容
(请给出正确答案)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
 更多“恢复机器人系统到出厂状态采用 。”相关的问题
更多“恢复机器人系统到出厂状态采用 。”相关的问题
B、机器人、机械手、焊接装置、焊件夹持装置
C、控制系统、焊接装置、焊件夹持装置
D、机器人机械手、控制系统、焊接装置、焊件夹持装置

为了使系统阶跃响应的稳态误差为零,采用串联PI控制器
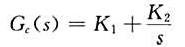
试设计合适的K1与K2值,使系统阶跃响应的超调量不大于5%,调节时间小于6s ( Δ=2%),静态速度误差系数Ku≥0.9。
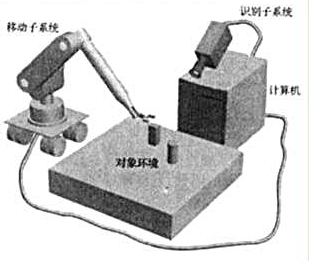
图6-26机器人和视觉系统
A.可用性B.性能C.易用性D.可修改性 A.抽象接口B.信息隐藏C.主动冗余D.记录/回放 A.可测试性B.易用性C.互操作性D.性能 A.资源调度B.操作串行化C.心跳D.内置监控器 A.可用性B.安全性C.可测试性D.可修改性 A.内置监控器B.追踪审计C.记录/回放D.维护现有接口

 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!



























