 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友nedved2010
发布时间:2022-01-07
[单选题]
有两台PD调节器,对它们施加相同的阶跃输人信号后,其输出规律如图所示,经比较可以看出:
有两台PD调节器,对它们施加相同的阶跃输人信号后,其输出规律如图所示,经比较可以看出: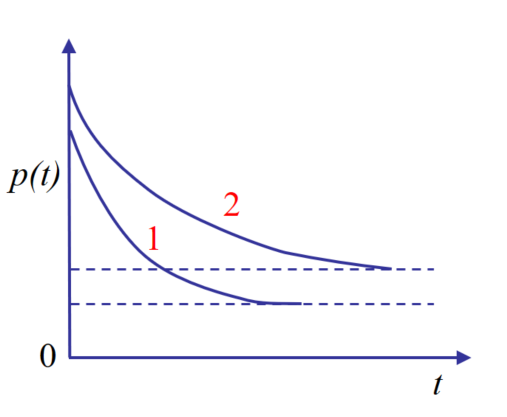
A.PB 1 < PB 2 ,T d1 > T d2
B.PB 1 < PB 2 ,T d1 < T d2
C.PB 1 > PB 2 ,T d1 < T d2
D.PB 1 > PB 2 ,T d1 > T d2
 参考答案
参考答案
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
 网友提供的答案
网友提供的答案
共位网友提供了参考答案,
查看全部
- · 有4位网友选择 C,占比50%
- · 有3位网友选择 D,占比37.5%
- · 有1位网友选择 B,占比12.5%



 和偏心距
和偏心距 两种表示方法,前者 。
两种表示方法,前者 。




























