题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yr1161772517
发布时间:2022-01-07
[主观题]
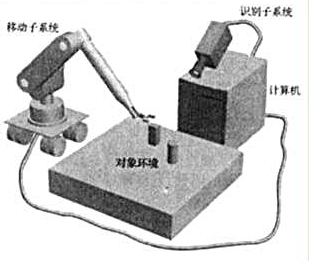
空间机器人的机械臂及其控制框图如图10-7所示。已知电机与机械臂构成的手臂传递函数为图10-7空
空间机器人的机械臂及其控制框图如图10-7所示。已知电机与机械臂构成的手臂传递函数为
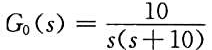
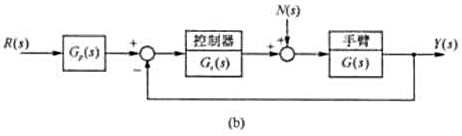
图10-7空间机器 人的机械臂控制系统
设计要求:
(1)当Gc(s) =K时,确定K的合适取值,使系统阶跃响应的超调量σ%=4.5% ;
(2)采用ITAE优化方法,并选取ωn=10,设计合适的PD控制器Gc(s),确定对应的前置滤波器Gp(s);
(3)采用ITAE优化方法,设计合适的Pl控制器Gc(s)和相应的前置滤波器Gp(s);
(4)采用ITAE优化方法和ωn=10,设计合适的PID控制器Gc(s) 和前置滤波器Gp (s);
(5)对比上述每种设计效果,列表比较系统对单位阶跃输入响应的σ%, tpp, ts(Δ=2%)以及由单位阶跃扰动引起的输出y (t) 的最大值和稳态值。
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案