题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友18***590
发布时间:2022-06-12
[主观题]
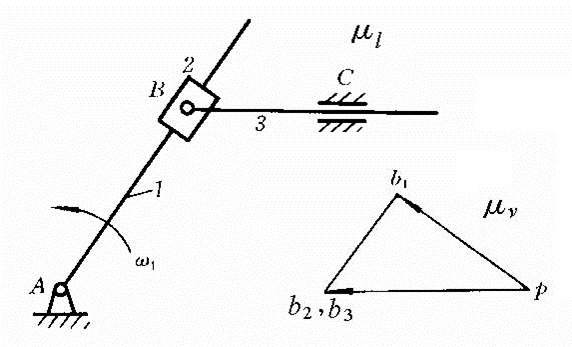
在图2-16所示结构中,已知个构件的长度,构件1以角速度 1逆时针方向回转.现已给出求受解机构
在图2-16所示结构中,已知个构件的长度,构件1以角速度1逆时针方向回转.现已给出求受解机构
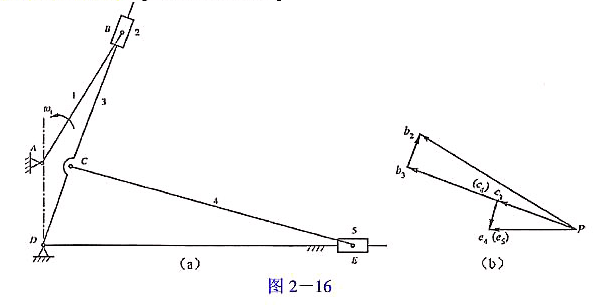
在图2-16所示结构中,已知个构件的长度,构件1以角速度 1逆时针方向回转.现已给出求受解机构在图示位置时构件5上E点的速度vE的速度多边形图.试写出求解vE的过程.(包括求解时所用的矢量方程式,各量的方向及大小的表达式)
1逆时针方向回转.现已给出求受解机构在图示位置时构件5上E点的速度vE的速度多边形图.试写出求解vE的过程.(包括求解时所用的矢量方程式,各量的方向及大小的表达式)
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案

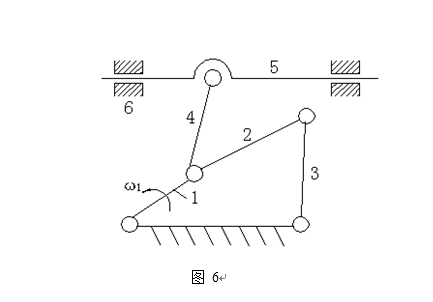
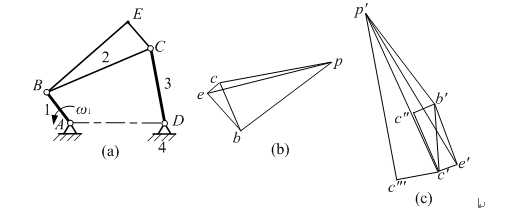
 1=60°,构件1以等角速度
1=60°,构件1以等角速度 1=10rad/s逆时针方向转动,试求点C的速度和加速度.
1=10rad/s逆时针方向转动,试求点C的速度和加速度.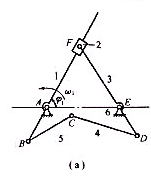
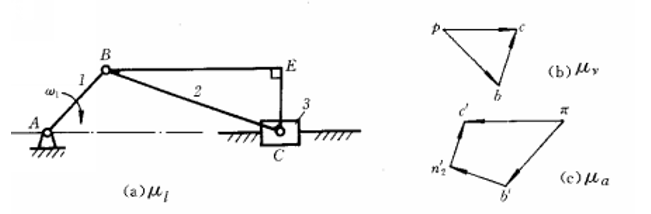
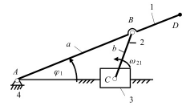
 1=30°,构件1的等角速度
1=30°,构件1的等角速度 1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.
1=6rad/s,h=400mm,试用解析法求构件3的速度和加速度.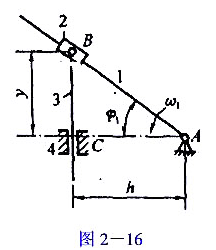




 。指出速度瞬心P13,并用瞬心法求构件1的角速度w1。
。指出速度瞬心P13,并用瞬心法求构件1的角速度w1。