题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友scailgw
发布时间:2022-01-07
[单选题]
在FANUC数控系统中,可以实现进给系统暂停1s的指令是()。
A.G04 P1000
B.G04 X1000
C.G04 P1
D.G04 X1
 参考答案
参考答案
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
 网友提供的答案
网友提供的答案
共位网友提供了参考答案,
查看全部
- · 有5位网友选择 D,占比50%
- · 有3位网友选择 B,占比30%
- · 有2位网友选择 A,占比20%



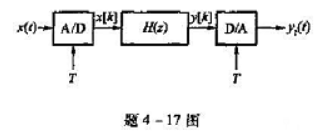
 将信号x[n]输入该系统,生成输出信号y[n]. (1) 判断该系统是否为线性系统? 是否为移不变系统?是否为因果系统? (2) 编写Python代码, 仿真上述系统, 输入信号为x[n]=sin(wn)+K的正弦信号时, 求系统的输出信号. 并分析输出信号如何受到K的值的影响?
将信号x[n]输入该系统,生成输出信号y[n]. (1) 判断该系统是否为线性系统? 是否为移不变系统?是否为因果系统? (2) 编写Python代码, 仿真上述系统, 输入信号为x[n]=sin(wn)+K的正弦信号时, 求系统的输出信号. 并分析输出信号如何受到K的值的影响?
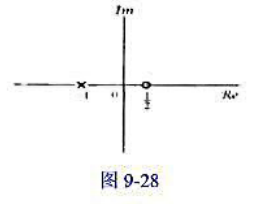
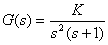 H(s) = 1 无论K为任何正值,下列说法正确的是
H(s) = 1 无论K为任何正值,下列说法正确的是 ,若s平面实轴上的-2.5点为其根轨迹的分离点,则此时第三闭环极点的实部为
,若s平面实轴上的-2.5点为其根轨迹的分离点,则此时第三闭环极点的实部为