题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友jufeng198710
发布时间:2022-01-06
[主观题]
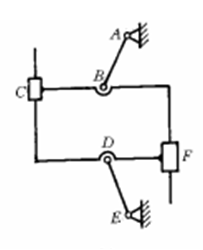
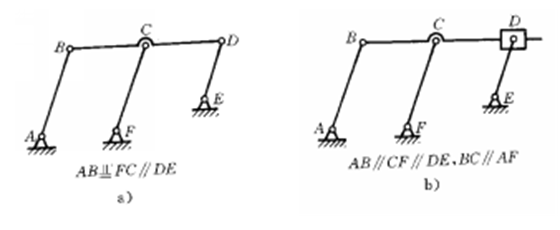
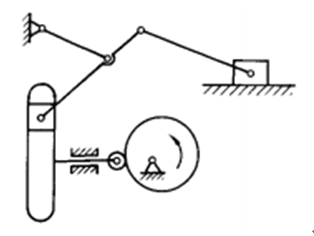
图示机构为一齿轮-连杆组合机构(图中各圆均表示齿轮),计算其机构的自由度,若机构AB杆为原动件时,问该机构是否运动确定?机构中若有复合铰链、局部自由度和虚约束,应明确指出。
图示机构为一齿轮-连杆组合机构(图中各圆均表示齿轮),计算其机构的自由度,若机构AB杆为原动件时,问该机构是否运动确定?机构中若有复合铰链、局部自由度和虚约束,应明确指出。 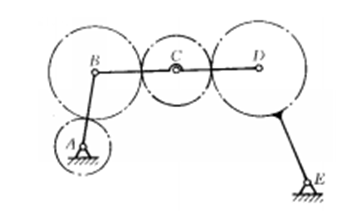
图示机构为一齿轮-连杆组合机构(图中各圆均表示齿轮),计算其机构的自由度,若机构AB杆为原动件时,问该机构是否运动确定?机构中若有复合铰链、局部自由度和虚约束,应明确指出。
A、机构中无局部自由度和虚约束
B、机构中B、C两处转动副为复合铰链
C、机构中A、B两处转动副为复合铰链
D、机构的自由度F = 3×6 – 2×7– 3 = 1
E、该机构的运动确定
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
 抱歉!暂无答案,正在努力更新中……
抱歉!暂无答案,正在努力更新中……