 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友hu344077805
发布时间:2022-01-07
[单选题]
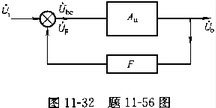
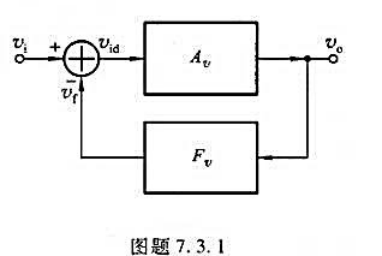
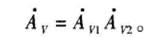
A.反馈电压f与电压之间的相位差为90°
B. 反馈电压f与电压之间的相位差为180°
C. 反馈电压f与电压己之间的相位差为零
D. 反馈电压f与电压之间的相位差为-180°
 参考答案
参考答案
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
 网友提供的答案
网友提供的答案
共位网友提供了参考答案,
查看全部
- · 有3位网友选择 B,占比33.33%
- · 有2位网友选择 D,占比22.22%
- · 有2位网友选择 A,占比22.22%
- · 有2位网友选择 C,占比22.22%



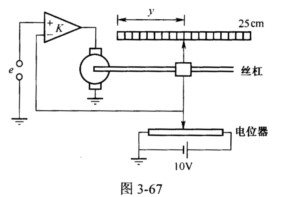 输入电压et(t)V,输出位移y(t)cm,放大器增益K=10,丝杠每转螺距1mm,电位计滑臂每移动1cm电压增量为0.4V。当对电机加10V阶跃电压时(带负载),稳态转速为1000 r/min,达到该值63.2%需要0.5s。画出系统方框图,求出传递函数Y(s)/E(s),并求系统单位阶跃响应的峰值时间tp、超调量σ%、调节时间ts和稳态值h(∞)。
输入电压et(t)V,输出位移y(t)cm,放大器增益K=10,丝杠每转螺距1mm,电位计滑臂每移动1cm电压增量为0.4V。当对电机加10V阶跃电压时(带负载),稳态转速为1000 r/min,达到该值63.2%需要0.5s。画出系统方框图,求出传递函数Y(s)/E(s),并求系统单位阶跃响应的峰值时间tp、超调量σ%、调节时间ts和稳态值h(∞)。
 , 画出系统的原理方框图,并简要说明其工作原理。
, 画出系统的原理方框图,并简要说明其工作原理。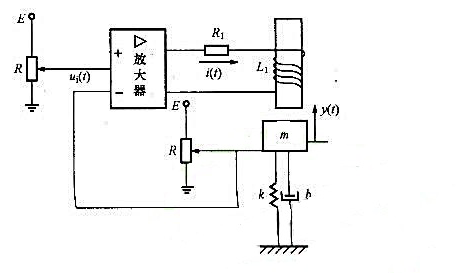

 ;
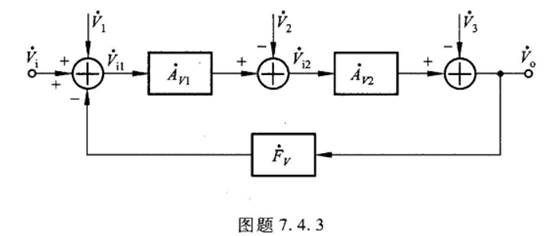
; 的稳态响应。
的稳态响应。




























