题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yanjingjing2019
发布时间:2022-06-04
[主观题]
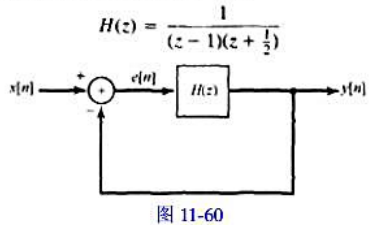
有一个离散时间反馈系统,其(a)分别画出K>0和K<0时的根轨迹。(b)如果已经正确地画出了K>0时的根
有一个离散时间反馈系统,其(a)分别画出K>0和K<0时的根轨迹。(b)如果已经正确地画出了K>0时的根
有一个离散时间反馈系统,其
(a)分别画出K>0和K<0时的根轨迹。
(b)如果已经正确地画出了K>0时的根轨迹,将会发现,根轨迹的两条支路跨过单位圆,并从单位圆上出去,结果可以得出,在 范围内,闭环系统是稳定的,这里K0是两条支路与单位圆相交的增益值。这些支路从单位圆上的什么点上出去?K0值为多少?
范围内,闭环系统是稳定的,这里K0是两条支路与单位圆相交的增益值。这些支路从单位圆上的什么点上出去?K0值为多少?
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案

 ,问若要使该系统稳定,常数
,问若要使该系统稳定,常数 应满足的条件时()。
应满足的条件时()。




 ,这个系统是无限脉冲响应的,还是有限脉冲响应的?
,这个系统是无限脉冲响应的,还是有限脉冲响应的?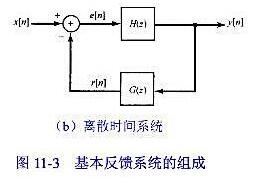
 试画出其级联型模拟框图,并写出相应的状态方程和输出方程。
试画出其级联型模拟框图,并写出相应的状态方程和输出方程。
 主值区间,且频率轴有一个
主值区间,且频率轴有一个 的线性变化;
的线性变化; 的线性变化;
的线性变化;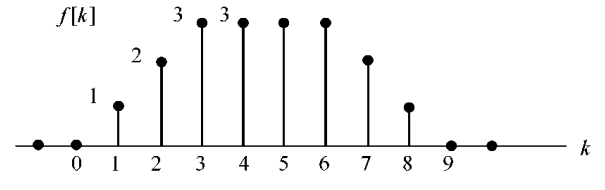
 的零极点分布图如题8图所示,试定性画出系统单位脉冲响应
的零极点分布图如题8图所示,试定性画出系统单位脉冲响应 的波形,求出系统函数
的波形,求出系统函数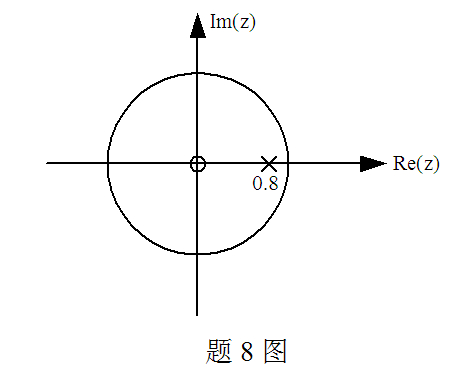

 。
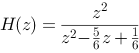
。 下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
 。
。 分析其传递函数为
分析其传递函数为