题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友koalaoo
发布时间:2022-01-07
[主观题]
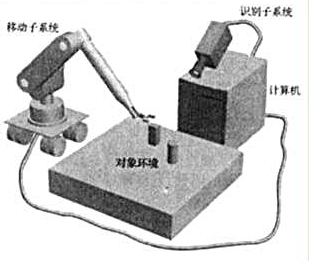
已知摄像机安装在机器人手坐标系T上,给定机器人在这个位置的雅克比矩阵的逆。机器人做了一个微分运动,并记录了坐标系的变化dT。求: (1)求摄像机在微分运动以后的位置 (2)求出微分算子 (3)求出与该运动有关的关节微分运动值
已知摄像机安装在机器人手坐标系T上,给定机器人在这个位置的雅克比矩阵的逆。机器人做了一个微分运动,并记录了坐标系的变化dT。求: (1)求摄像机在微分运动以后的位置 (2)求出微分算子 (3)求出与该运动有关的关节微分运动值 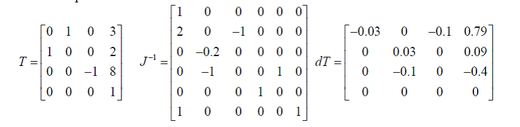
已知摄像机安装在机器人手坐标系T上,给定机器人在这个位置的雅克比矩阵的逆。机器人做了一个微分运动,并记录了坐标系的变化dT。求: (1)求摄像机在微分运动以后的位置 (2)求出微分算子 (3)求出与该运动有关的关节微分运动值
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
 抱歉!暂无答案,正在努力更新中……
抱歉!暂无答案,正在努力更新中……