 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友freewind1314
发布时间:2022-01-07
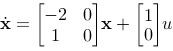
[单选题]

A.系统不能通过状态反馈将闭环极点配置到-1,-2,-4。
B.系统能通过状态反馈将闭环极点配置到-1,-2,-5。
C.系统能通过状态反馈将闭环极点配置到-1,-2,-4。
D.系统不能通过状态反馈将闭环极点配置到-1,-2,-5。
 参考答案
参考答案
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
 网友提供的答案
网友提供的答案
共位网友提供了参考答案,
查看全部
- · 有3位网友选择 A,占比37.5%
- · 有2位网友选择 D,占比25%
- · 有2位网友选择 C,占比25%
- · 有1位网友选择 B,占比12.5%





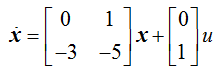 下面论述正确的是()
下面论述正确的是()
 ,则可以将闭环极点配置到
,则可以将闭环极点配置到
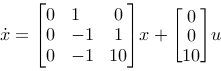 可否用状态反馈任意配置闭环极点,为什么?求状态反馈矩阵,使闭环极点位于
可否用状态反馈任意配置闭环极点,为什么?求状态反馈矩阵,使闭环极点位于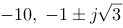 处。
处。
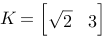
 请设计全状态反馈控制器
请设计全状态反馈控制器 ,将闭环系统极点配置为
,将闭环系统极点配置为 ,则
,则



 请设计全状态反馈控制器
请设计全状态反馈控制器 ,将闭环系统极点配置为
,将闭环系统极点配置为 ,则
,则



 请设计出一个状态反馈向量k,使得闭环系统的极点配置到(-2,-2,-1,-1)。另外,如果想将系统的所有极点均配置到-2,这样配置是否可行?请解释原因。
请设计出一个状态反馈向量k,使得闭环系统的极点配置到(-2,-2,-1,-1)。另外,如果想将系统的所有极点均配置到-2,这样配置是否可行?请解释原因。




























