题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yanjingjing2019
发布时间:2022-06-04
[主观题]
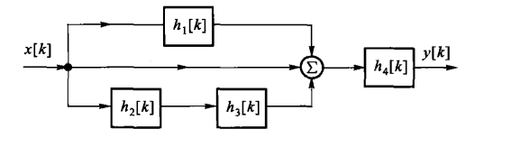
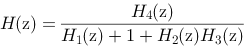
(a)考虑图11-60所示的离散时间反馈系统。假设证明该系统在下述意义下能够跟踪一个单位阶跃,若x[
(a)考虑图11-60所示的离散时间反馈系统。假设证明该系统在下述意义下能够跟踪一个单位阶跃,若x[
(a)考虑图11-60所示的离散时间反馈系统。假设
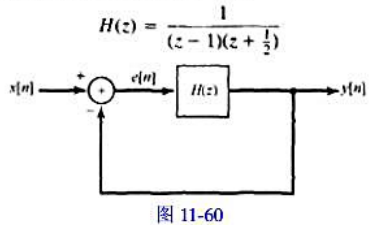
证明该系统在下述意义下能够跟踪一个单位阶跃,若x[n]=u[n],则

(b)更一般的是,考虑图11-60所示的反馈系统,并假设闭环系统是稳定的。假定H(z)有一个极点在z=1,证明:该系统能够跟踪一个单位阶跃。
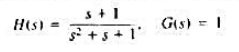
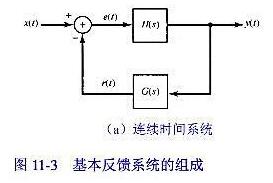
(c)上面(a)和(b)的结果是在离散时间中的,与习题11.57和习题11.58讨论的连续时间系统的结果相对应。在离散时间中,也能够考虑在经过若干步以后完全地跟踪给定输入的系统设计问题。这种系统称为临界阻尼反馈系统(deadbeat feedback system)。
现考虑图11-60所示的离散时间系统,其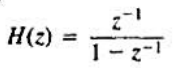 。
。
证明:整个闭环系统是一个临界阻尼反馈系统,而且在经过一步以后,就能完全跟踪上一个阶跃输入,即若x[n]=u[n],那么n≥1时e[n]=0。
(d)证明图11-60的反馈系统,在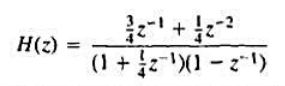 下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
(e)更一般地,对于图11-60所示的反馈系统,求出使y[n]在n≥N后完全跟踪上一个单位阶跃的H(z);事实上,这是要使

其中ak是给定的常数。
(f)若图11-60所示系统中的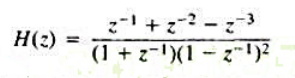 。
。
证明:该系统在经过两步以后就能完全跟踪上一个斜坡信号x[n]=(n+1)u[n]。
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案

 ,这个系统是无限脉冲响应的,还是有限脉冲响应的?
,这个系统是无限脉冲响应的,还是有限脉冲响应的?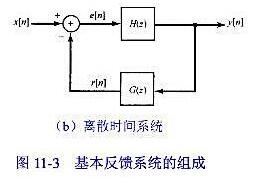
 。
。
 。
。




 是()。
是()。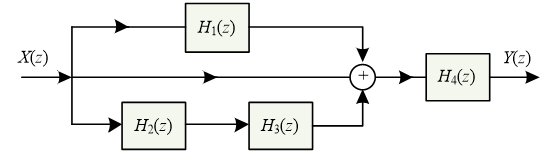


 是 ()
是 ()




 是 ()
是 ()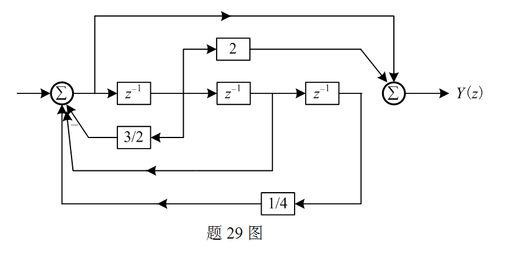

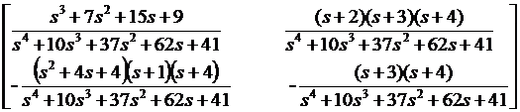
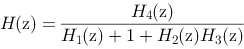
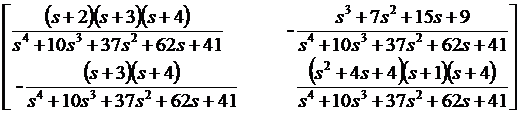
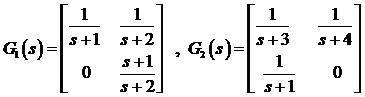
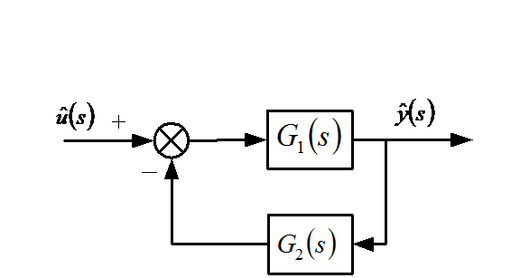
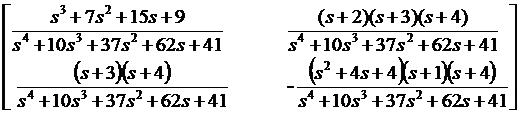
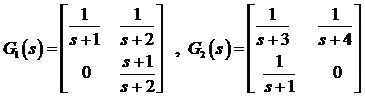
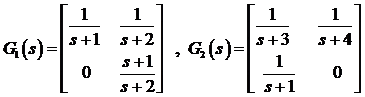 试定出反馈系统的传递函数矩阵
试定出反馈系统的传递函数矩阵 。()
。()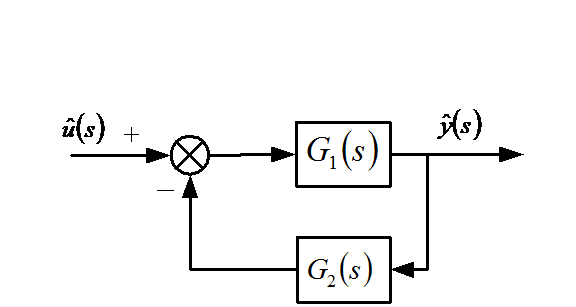
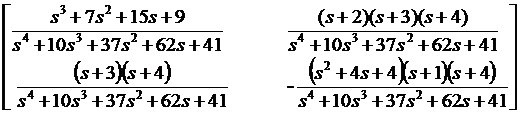

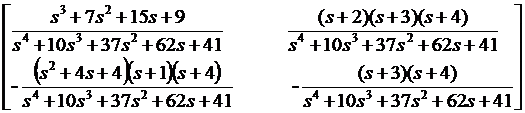
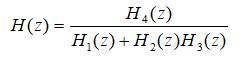
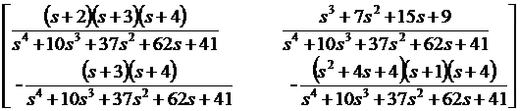
 试定出反馈系统的传递函数矩阵
试定出反馈系统的传递函数矩阵 。()
。()

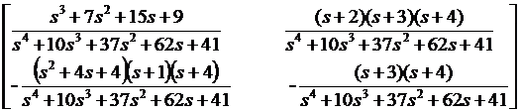
 试定出反馈系统的传递函数矩阵
试定出反馈系统的传递函数矩阵 。()
。()