题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友longzifeng
发布时间:2022-01-06
[主观题]
机器人的精度主要依存于机械误差、控制算法误差与分辨率系统误差。一般说来()。A.绝对定位精度高于
机器人的精度主要依存于机械误差、控制算法误差与分辨率系统误差。一般说来()。
A.绝对定位精度高于重复定位精度
B.重复定位精度高于绝对定位精度
C.机械精度高于控制精度
D.控制精度高于分辨率精度
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案

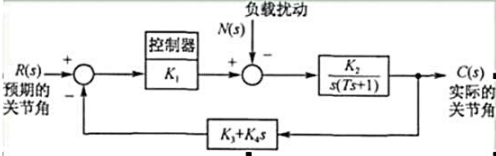
 对C(s)的影响,指出减少此种影响的方法;
对C(s)的影响,指出减少此种影响的方法; 时, 计算系统在输出端定义的稳态误差,指出减少此种稳态误差的方法。
时, 计算系统在输出端定义的稳态误差,指出减少此种稳态误差的方法。