题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友wu16wu16
发布时间:2022-01-06
[单选题]
如图所示,设Wm(s)为前馈控制器,Wf(s)与W0(s)分别为过程扰动通道与控制通道的传递函数,F(s)与Y(s)分别为可测不可控扰动与被控量,则前馈控制器的模型为()。
如图所示,设Wm(s)为前馈控制器,Wf(s)与W0(s)分别为过程扰动通道与控制通道的传递函数,F(s)与Y(s)分别为可测不可控扰动与被控量,则前馈控制器的模型为()。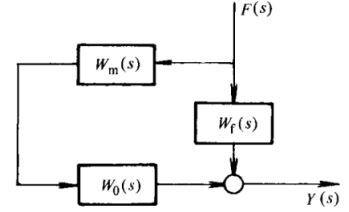
A.Wm(s)= Wf(s)/ W0(s)
B.Wm(s)= -[Wf(s)/ W0(s)]
C.Wm(s)= W0(s)/ Wf(s)
D.Wm(s)= -[W0(s)/ Wf(s)]
 参考答案
参考答案
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
 网友提供的答案
网友提供的答案
共位网友提供了参考答案,
查看全部
- · 有3位网友选择 D,占比37.5%
- · 有3位网友选择 A,占比37.5%
- · 有1位网友选择 C,占比12.5%
- · 有1位网友选择 B,占比12.5%