 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yr1161772517
发布时间:2022-03-18
[主观题]
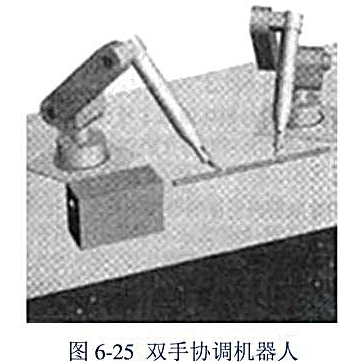
双手协调机器人如图6-25 所示,两台机械手相互协作,试图将一根长杆插入另一物体。已知单个机器
人关节的反馈控制系统为单位反馈控制系统,被控对象为机械臂,其传递函数
要求设计一个串联超前一滞后校正网络,使系统在单位斜坡输入时的稳态误差不大于0.0125,单位阶跃响应的超调量小于25%,调节时间小于3s(Δ=2%),并要求给出系统校正前后的单位阶跃输入响应曲线。试问:选用网络

是否合适?
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案































