题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友lhy8581
发布时间:2022-01-07
[单选题]
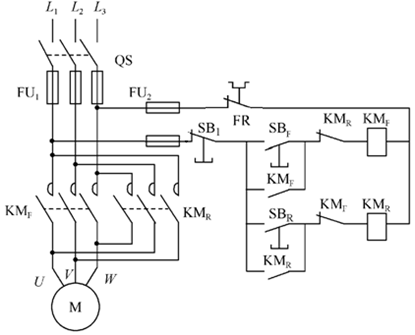
分析速度原则控制的反接制动电路如图所示,电机启动速度达到 r/min 时KS常开触点闭合,制动过程中速度低于 r/min 时,KS常开触点复位切断电源。
分析速度原则控制的反接制动电路如图所示,电机启动速度达到 r/min 时KS常开触点闭合,制动过程中速度低于 r/min 时,KS常开触点复位切断电源。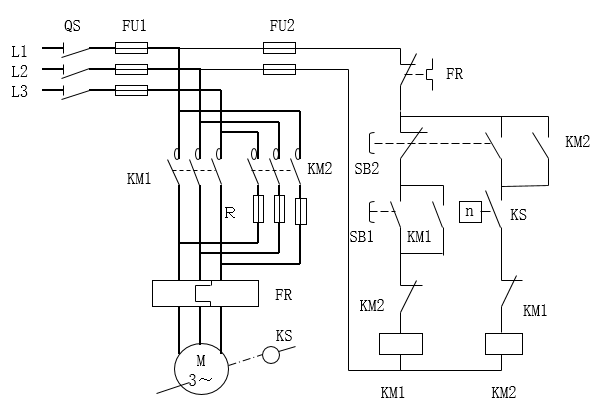
A.120 0
B.100 120
C.120 100
D.100 50
 参考答案
参考答案
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
 网友提供的答案
网友提供的答案
共位网友提供了参考答案,
查看全部
- · 有5位网友选择 D,占比62.5%
- · 有2位网友选择 A,占比25%
- · 有1位网友选择 C,占比12.5%