题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友anonymity
发布时间:2022-01-07
[主观题]
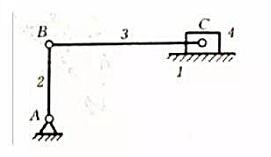
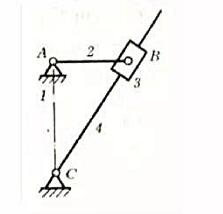
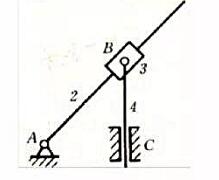
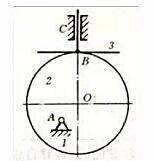
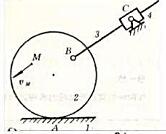
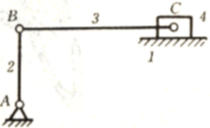
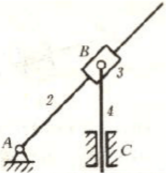
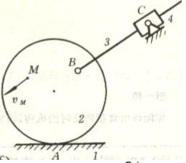
试求图所示各机构在图示位置时全部瞬心的位置。


 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案
题目内容
(请给出正确答案)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
 更多“试求图所示各机构在图示位置时全部瞬心的位置。”相关的问题
更多“试求图所示各机构在图示位置时全部瞬心的位置。”相关的问题
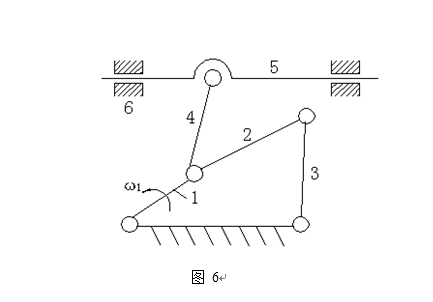
已知图所示机构的位置,构件尺寸及原动件AB以等角速度ω1逆时针方向转动,试求:
(1)在图上标出全部速度瞬心P12、P23、P34、P14、P13和P24,并指出其中的绝对瞬心。
(2)用相对运动图解法以任意比例尺作出机构的速度图和加速度图,求构件3的角速度ω3和角加速度ε3。
(要求:①写出作图的矢量方程和主要步骤;②写出ω3及α3的表达式)。
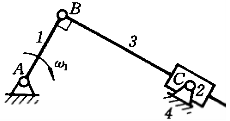
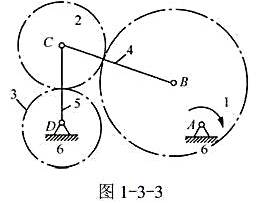
图1-3-3所示齿轮——连杆组合机构。已知齿轮1位主动件,转向顺时针;齿轮3为从动件。
(1)求该机构的自由度(要求有具体计算过程);
(2)用瞬心法求机构在图示位置时的传动比 (列出计算表达方式即可);
(列出计算表达方式即可);
(3)针对图示机构位置,直接在图上将机构中的高副化为低副;
(4)另行画出机构所含各杆组,并确定杆组的级别和机构的级别。
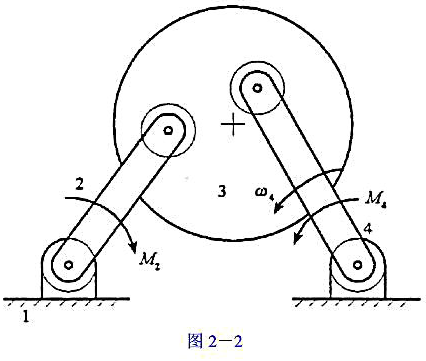
(1)试求出图2-2所示机构的所有速度瞬心位置,当给定构件4以 4运动时,2=?
4运动时,2=?
(2)假设摩擦圆为图2-2中细实现校园,摩擦角为10°时,画出各运动副的总反力位置.
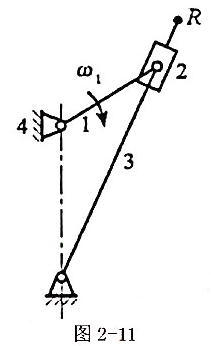
在图2-11所示摆动导杆机构中,设已知构件1的角速度 1顺时针转动及各构件尺寸.试求:
1顺时针转动及各构件尺寸.试求:
(1)构件1、3的相对瞬心;
(2)构件3的角速度3;
(3)R点的速度vR;
(4)构件2的角速度2.
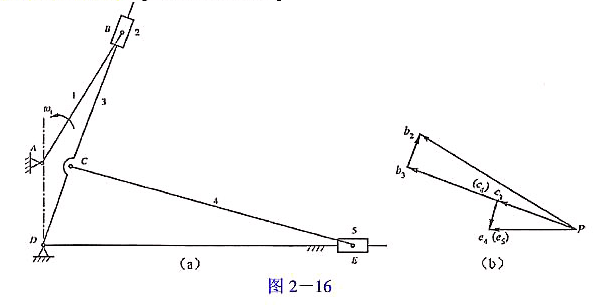
在图2-16所示结构中,已知个构件的长度,构件1以角速度1逆时针方向回转.现已给出求受解机构在图示位置时构件5上E点的速度vE的速度多边形图.试写出求解vE的过程.(包括求解时所用的矢量方程式,各量的方向及大小的表达式)


 警告:系统检测到您的账号存在安全风险
警告:系统检测到您的账号存在安全风险
为了保护您的账号安全,请在“简答题”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

![试求图3-18所示机构在图示位置时全部瞬心的位置。 [图]...试求图3-18所示机构在图示位置时全](https://img2.soutiyun.com/shangxueba/ask/16971001-16974000/16971514/c4326fe-chaoxing2016-429147.png)