题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
提问人:网友yanjingjing2019
发布时间:2022-06-04
[主观题]
再次考虑例11.3的离散时间反馈系统,K>0和K<0时的根轨迹如图11-39所示。(a)考虑K>0时的根轨迹。这
再次考虑例11.3的离散时间反馈系统,K>0和K<0时的根轨迹如图11-39所示。(a)考虑K>0时的根轨迹。这
再次考虑例11.3的离散时间反馈系统 ,K>0和K<0时的根轨迹如图11-39所示。
,K>0和K<0时的根轨迹如图11-39所示。
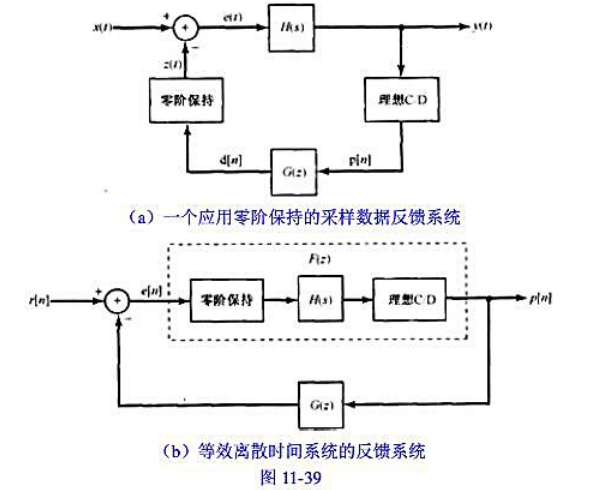
(a)考虑K>0时的根轨迹。这时,当闭环极点之一小于或等于-1时,该系统就变成不稳定的,求z=-1是一个闭环极点时的K值。
(b)考虑K<0时的根轨迹。这时,当闭环极点之一大于或等于1时,该系统就变成不稳定的,求z=1是一个闭环极点时的K值。
(c)使闭环系统是稳定的整个K值范围是什么?
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
查看官方参考答案

 ,这个系统是无限脉冲响应的,还是有限脉冲响应的?
,这个系统是无限脉冲响应的,还是有限脉冲响应的?

 。
。 下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
 。
。
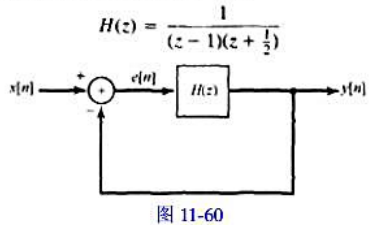
 (1)在z平面画根轨迹图;
(1)在z平面画根轨迹图; ,问若要使该系统稳定,常数
,问若要使该系统稳定,常数 应满足的条件时()。
应满足的条件时()。




 。
。


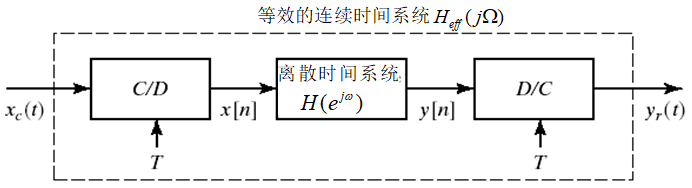
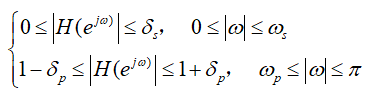 ,考虑采用双线性变换法
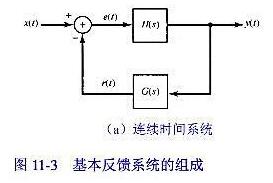
,考虑采用双线性变换法 设计一IIR滤波器来逼近该指标。 (1)原型连续时间滤波器的通带截止频率是多少? (2)将该离散时间滤波器用于下图系统中处理连续时间信号,则整个等效连续时间系统的通带截止频率是多少?
设计一IIR滤波器来逼近该指标。 (1)原型连续时间滤波器的通带截止频率是多少? (2)将该离散时间滤波器用于下图系统中处理连续时间信号,则整个等效连续时间系统的通带截止频率是多少?