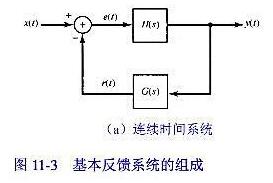
(a)考虑图11-60所示的离散时间反馈系统。假设证明该系统在下述意义下能够跟踪一个单位阶跃,若x[
(a)考虑图11-60所示的离散时间反馈系统。假设
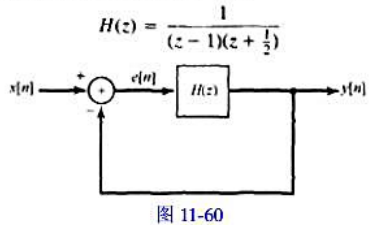
证明该系统在下述意义下能够跟踪一个单位阶跃,若x[n]=u[n],则

(b)更一般的是,考虑图11-60所示的反馈系统,并假设闭环系统是稳定的。假定H(z)有一个极点在z=1,证明:该系统能够跟踪一个单位阶跃。
(c)上面(a)和(b)的结果是在离散时间中的,与习题11.57和习题11.58讨论的连续时间系统的结果相对应。在离散时间中,也能够考虑在经过若干步以后完全地跟踪给定输入的系统设计问题。这种系统称为临界阻尼反馈系统(deadbeat feedback system)。
现考虑图11-60所示的离散时间系统,其 。
。
证明:整个闭环系统是一个临界阻尼反馈系统,而且在经过一步以后,就能完全跟踪上一个阶跃输入,即若x[n]=u[n],那么n≥1时e[n]=0。
(d)证明图11-60的反馈系统,在 下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
下是一个临界阻尼系统,并具有如下跟踪性质:在经过若干步之后,输出能完全跟踪一个单位阶跃,问在哪一步,误差e[n]首先到达零?
(e)更一般地,对于图11-60所示的反馈系统,求出使y[n]在n≥N后完全跟踪上一个单位阶跃的H(z);事实上,这是要使

其中ak是给定的常数。
(f)若图11-60所示系统中的 。
。
证明:该系统在经过两步以后就能完全跟踪上一个斜坡信号x[n]=(n+1)u[n]。
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
 来完成。具体而言,画出K>0时的根轨迹,并标出使阻尼能得到明显改善的增益值K。
来完成。具体而言,画出K>0时的根轨迹,并标出使阻尼能得到明显改善的增益值K。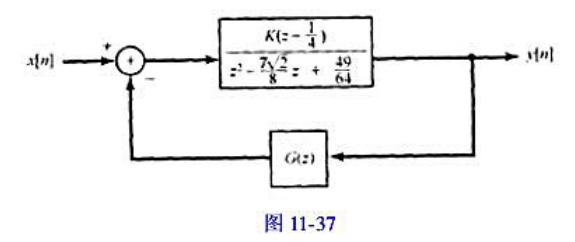
 简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)
简答题官方参考答案
(由简答题聘请的专业题库老师提供的解答)

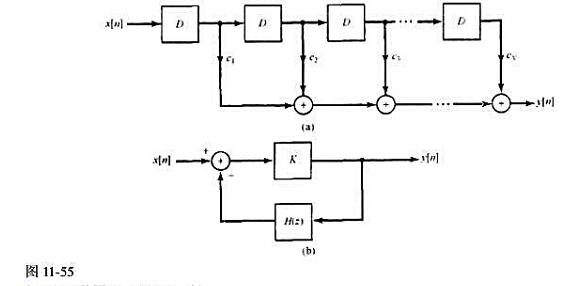
 ,这个系统是无限脉冲响应的,还是有限脉冲响应的?
,这个系统是无限脉冲响应的,还是有限脉冲响应的?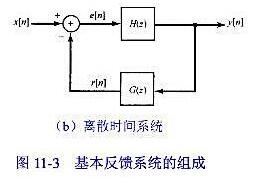
 (1)在z平面画根轨迹图;
(1)在z平面画根轨迹图;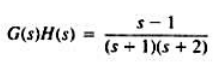 ,K<0时的根轨迹图如图11-30(b)所示。对某一K值,闭环极点位于jω轴上。通过考虑方程
,K<0时的根轨迹图如图11-30(b)所示。对某一K值,闭环极点位于jω轴上。通过考虑方程 的实部和虚部,若s=jω对任何给定的K值位于根轨迹上,就必须满足上式,依此求出这个K值和相应的闭环极点位置。利用这一结果,再加上例11.2中的分析,求出使闭环系统稳定的全部K值(正的和负的)的范围。
的实部和虚部,若s=jω对任何给定的K值位于根轨迹上,就必须满足上式,依此求出这个K值和相应的闭环极点位置。利用这一结果,再加上例11.2中的分析,求出使闭环系统稳定的全部K值(正的和负的)的范围。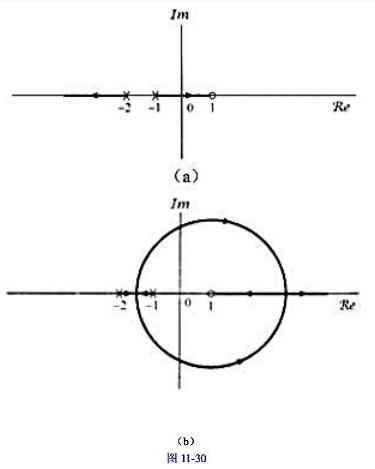
 。
。
 ,问若要使该系统稳定,常数
,问若要使该系统稳定,常数 应满足的条件时()。
应满足的条件时()。




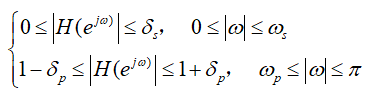 ,考虑采用双线性变换法
,考虑采用双线性变换法 设计一IIR滤波器来逼近该指标。 (1)原型连续时间滤波器的通带截止频率是多少? (2)将该离散时间滤波器用于下图系统中处理连续时间信号,则整个等效连续时间系统的通带截止频率是多少?
设计一IIR滤波器来逼近该指标。 (1)原型连续时间滤波器的通带截止频率是多少? (2)将该离散时间滤波器用于下图系统中处理连续时间信号,则整个等效连续时间系统的通带截止频率是多少?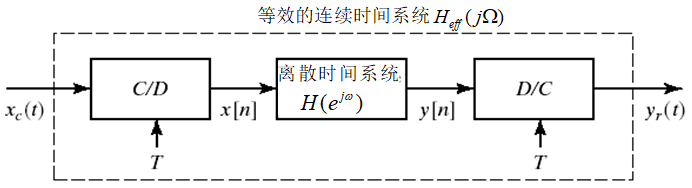
 ,利用奈奎斯特图和奈奎斯特稳定判据确定该闭环系统是稳定的K值范围。
,利用奈奎斯特图和奈奎斯特稳定判据确定该闭环系统是稳定的K值范围。 ,求单位阶跃响应
,求单位阶跃响应 和调节时间
和调节时间 。
。




























